Dear LAMMPS Developers:
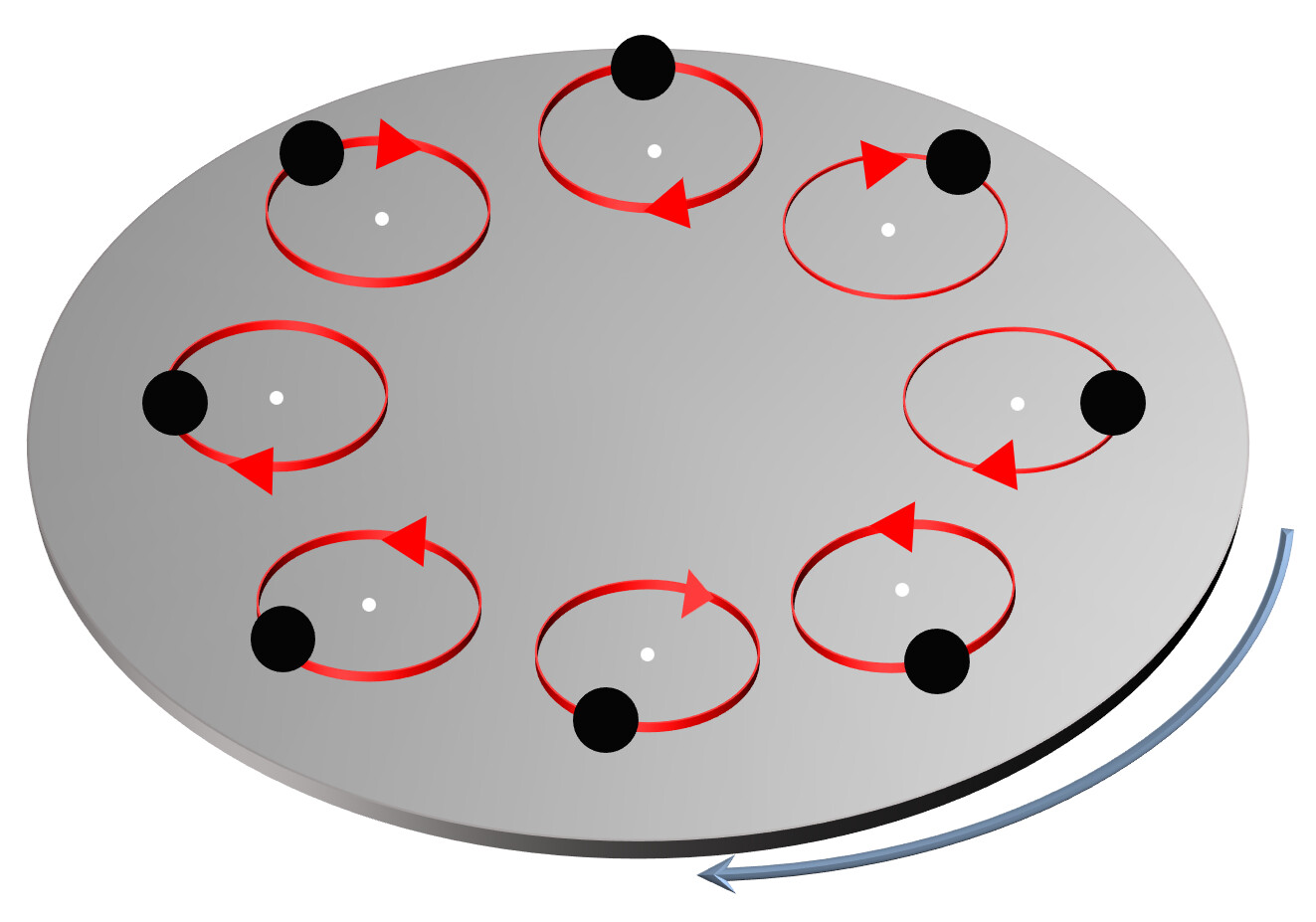
We would like to calculate the angular velocity associated with the overall rotation of the lattice. However, we have some uncertainties regarding the physical interpretation of the angular velocity, denoted as omega, in LAMMPS. In our specific setup, the atoms of the lattice simultaneously undergo two types of rotation: a local rotation around their individual equilibrium positions and an overall rotation about the centroid of the system. As shown in the disc sample below , black dots represent the atoms, white dots represent the equilibrium position of the atoms, the red circle represents the local rotation, and the blue arrows represent the overall rotation of the lattice. In this case, the mechanical angular momentum calculated by the LAMMPS compute command, that is, the total angular momentum of all atoms with respect to the centroid of the lattice, denoted Lz, contains contributions from both local and overall rotations.
We are seeking clarification on whether the angular velocity obtained from the commands ‘compute omega’ and ‘compute omega/chunk’ in LAMMPS corresponds to the angular velocity of the overall rotation of the lattice as described in our system. Alternatively, does this angular velocity result from the formula w=Lz/Iz, where Iz is the moment of inertia relative to the center of mass. Obviously, w does not correspond to the overall rotation of the lattice, since the latter is equal to the corresponding angular momentum of the overall rotation rather than the total angular momentum Lz, divided by the inertia moment.
We would like to get the physical meaning of omega, for our particular system, whether it also represents the overall rotation velocity of the lattice.
We would appreciate any guidance or assistance regarding this matter. Thank you very much for your attention.